


本文是柯师兄的论文“基于双目视觉的散乱堆放工件拾取系统”
流程:
法线和曲率计算:
基于区域生长法对工件堆点云的分割
点云分割方法有很多种:比如欧式聚类法,区域生长法
文中用的是区域生长法
基于ISS算法的工件关键点提取
关键点:下采样点,ISS,Harris,SIFT
关键点:可以稳定描述,并有较强区分性的点作为关键点。
下采样的方法最快,获取点云的数量可由栅格决定(栅格下采样)
ISS算法方法次之,但关键点能稳定提取
Harris和SIFT速度比较慢,特别是Harris算子,提取的关键点数较少。
ISS(Instrinsic Shape Signatures):
在点云中每个点建立一个独立坐标系 ,z轴是曲面在该点的法线方向,通过某种方法确定x轴和y轴,通过三个轴线上的特征向量建立具有区分性形状描述的特征点。
,z轴是曲面在该点的法线方向,通过某种方法确定x轴和y轴,通过三个轴线上的特征向量建立具有区分性形状描述的特征点。
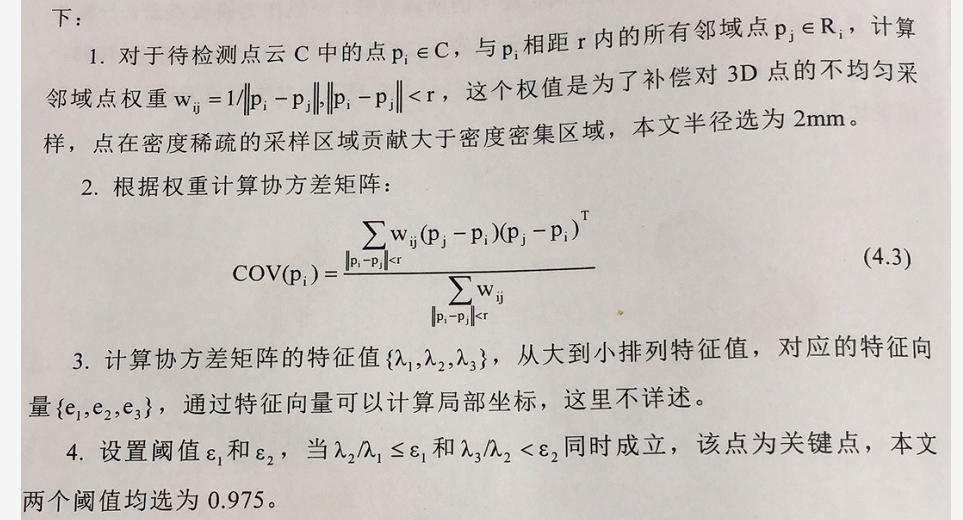
对计算出来的协方差矩阵的三个特征值做比较,两个比值分别小于两个阈值,则认为该点是特征点。
基于SHOT算法的关键点特征描述
从模型库和场景点云中提取出来的关键点,必须通过配对才能就估计场景中的工件的位姿,配对需要提取关键点高度区分的特征描述,当两点描述几乎一致,这两点配对成功。
描述子:FPFH,SHOT
两者的描述能力都较强,Shot的计算速度比FPFH快十倍。
Hough粗位姿估计
粗定位的方法:
SAC-IA :“Aligning Point Cloud Views using Persistent Feature Histograms”
RANSAC: “Pose Estimation using Local Structure-Specific Shape and Appearance Context”
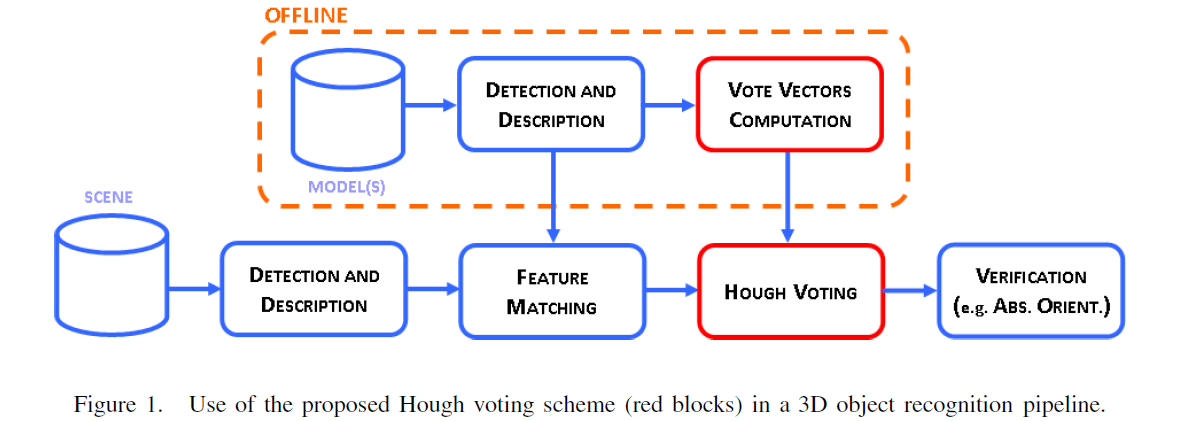
Hough(用时较短):“Object Recognition in 3D Scenes with Occlusions and Clutter by Hough Voting”
霍夫变换可以进行多目标识别,在霍夫参数空间中,如果有多个极值存在,则表明场景有多个目标。
霍夫变换HT
霍夫变换原本是一种流行的计算机图形处理技术,通常用于直线检测,后来被改进用于圆和椭圆的检测。它的原理关键是使用投票的方法对参数空间进行投票。将参数空间分成若干个区间,每个区间设置一个箱子,当在图像空间中检测某些特征,由这些特征估算出的参数,并在参数空间中相应的箱子投票加一,如此遍历所有特征,得到参数空间中票数最高的箱子,其对应的区间即为所求参数。
将旋转平移作为参数空间,旋转有三个变量 ,平移也有三个变量
,平移也有三个变量 ,一共有六个参数,意味着参数空间计算量巨大而且占用大量内存。
,一共有六个参数,意味着参数空间计算量巨大而且占用大量内存。

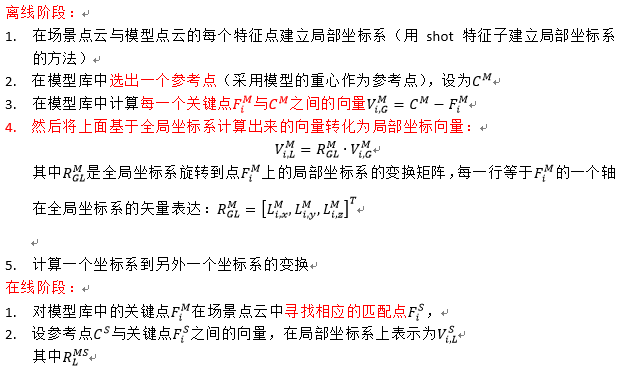
步骤:
每个特征点与其相对于模型质心的相对位置相关联,使得每个对应的场景特征可以在三维Hough空间中进行投票,为当前场景中可能存在的质心位置积累证据。
ICP精确位姿估计和匹配度计算
略