
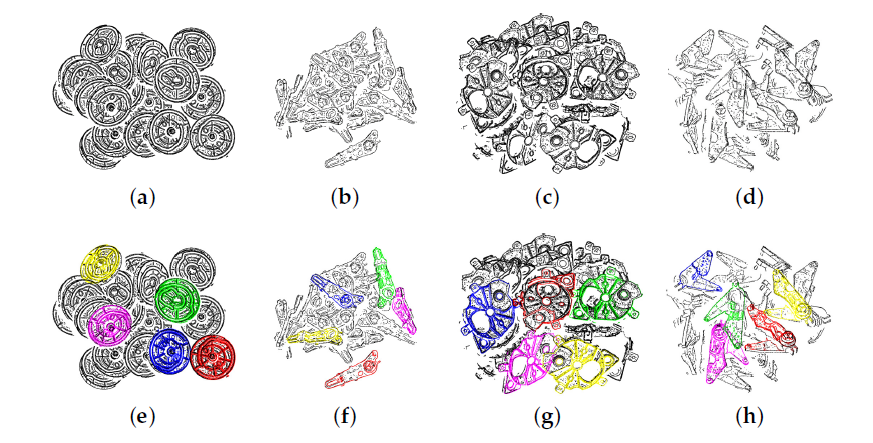
出自于论文“Point Pair Feature-Based Pose Estimation with Multiple Edge Appearance Models (PPF-MEAM) for Robotic Bin Picking”
针对多边的树脂工件的改进PPF
出自于论文“Point Pair Feature-Based Pose Estimation with Multiple Edge Appearance Models (PPF-MEAM) for Robotic Bin Picking”
针对多边的树脂工件的改进PPF
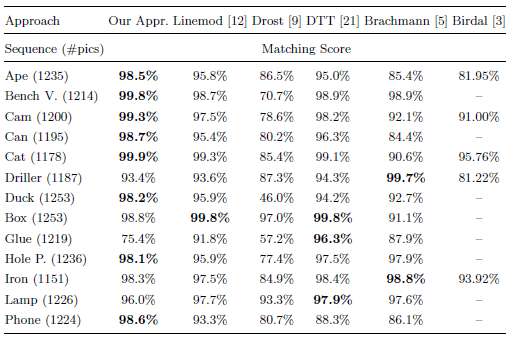
论文:Going Further with Point Pair Features
linemod作者改进2010的Drost-PPF,使得改进PPF在2016年的“state of the art”。在下面数据集中,本文方法只使用了深度数据,而[12][5][21]使用了彩色数据,还是在13种类别中,在8个类别里面获得了最高分。
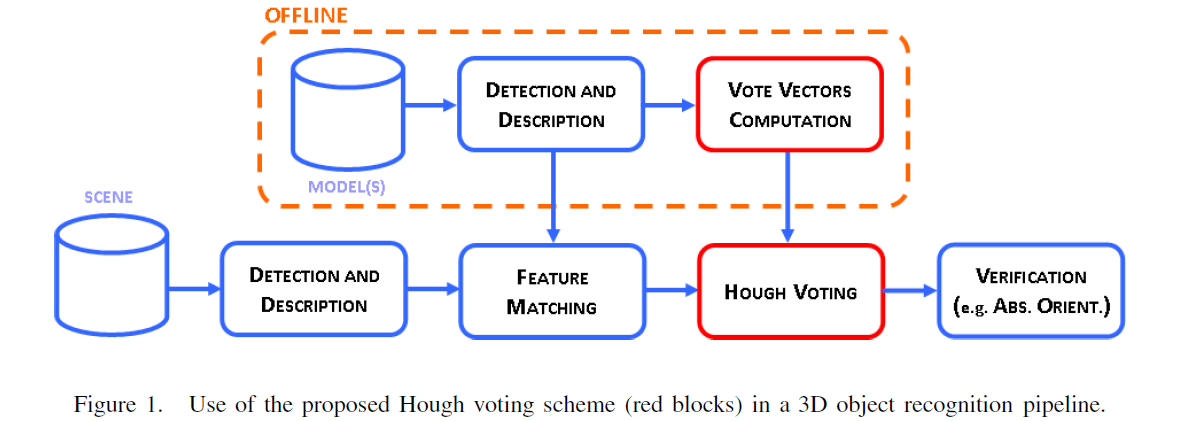
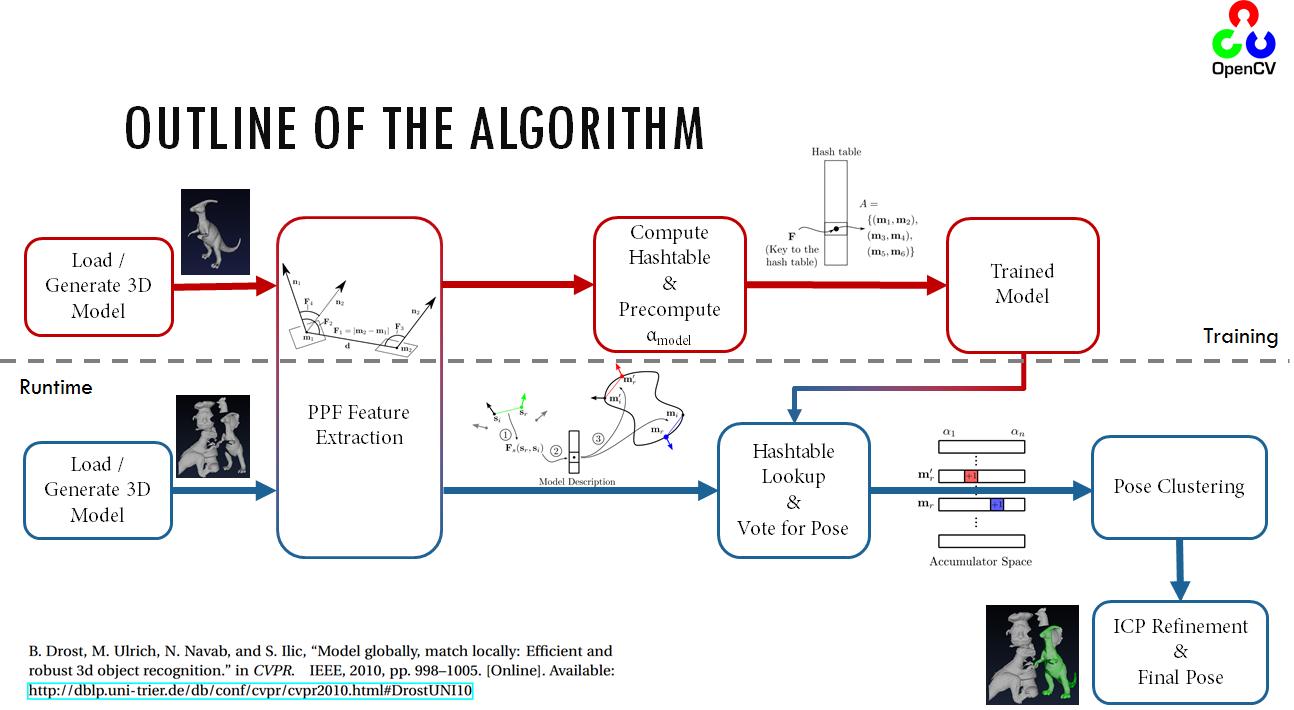
1.PPF在三维物体识别与位姿估计算法中表现优异,本文是论文“Model Globally, Match Locally: Efficient and Robust 3D Object Recognition”的解读
2.PPF是halcon中surface_matching算子实现原理
3.PPFoutline
Update your browser to view this website correctly. Update my browser now