staticvoidhelp(conststring& errorMessage) { cout << "Program init error : "<< errorMessage << endl; cout << "\nUsage : ppf_matching [input model file] [input scene file]"<< endl; cout << "\nPlease start again with new parameters"<< endl; }
intmain(int argc, char** argv) { // welcome message cout << "****************************************************" << endl; cout << "* Surface Matching demonstration : demonstrates the use of surface matching" " using point pair features." << endl; cout << "* The sample loads a model and a scene, where the model lies in a different" " pose than the training.\n* It then trains the model and searches for it in the" " input scene. The detected poses are further refined by ICP\n* and printed to the " " standard output." << endl; cout << "****************************************************" << endl; if (argc < 3) { help("Not enough input arguments"); exit(1); } #if (defined __x86_64__ || defined _M_X64) cout << "Running on 64 bits" << endl; #else cout << "Running on 32 bits" << endl; #endif #ifdef _OPENMP cout << "Running with OpenMP" << endl; #else cout << "Running without OpenMP and without TBB" << endl; #endif string modelFileName = (string)argv[1]; string sceneFileName = (string)argv[2]; Mat pc = loadPLYSimple(modelFileName.c_str(), 1); // Now train the model cout << "Training..." << endl; int64 tick1 = cv::getTickCount(); ppf_match_3d::PPF3DDetector detector(0.025, 0.05); detector.trainModel(pc); int64 tick2 = cv::getTickCount(); cout << endl << "Training complete in " << (double)(tick2-tick1)/ cv::getTickFrequency() << " sec" << endl << "Loading model..." << endl; // Read the scene Mat pcTest = loadPLYSimple(sceneFileName.c_str(), 1); // Match the model to the scene and get the pose cout << endl << "Starting matching..." << endl; vector<Pose3DPtr> results; tick1 = cv::getTickCount(); detector.match(pcTest, results, 1.0/40.0, 0.05); tick2 = cv::getTickCount(); cout << endl << "PPF Elapsed Time " << (tick2-tick1)/cv::getTickFrequency() << " sec" << endl; // Get only first N results int N = 2; vector<Pose3DPtr> resultsSub(results.begin(),results.begin()+N); // Create an instance of ICP ICP icp(100, 0.005f, 2.5f, 8); int64 t1 = cv::getTickCount(); // Register for all selected poses cout << endl << "Performing ICP on " << N << " poses..." << endl; icp.registerModelToScene(pc, pcTest, resultsSub); int64 t2 = cv::getTickCount(); cout << endl << "ICP Elapsed Time " << (t2-t1)/cv::getTickFrequency() << " sec" << endl; cout << "Poses: " << endl; // debug first five poses for (size_t i=0; i<resultsSub.size(); i++) { Pose3DPtr result = resultsSub[i]; cout << "Pose Result " << i << endl; result->printPose(); if (i==0) { Mat pct = transformPCPose(pc, result->pose); writePLY(pct, "para6700PCTrans.ply"); } } return0; }





采样。(另外一种表述:用这些特征值划分到特定的区间中,于是将稀疏的特征,变成了由特定区间组成的向量。)
 在我们要检测的物体上,那么对应模型点云中也有一点
在我们要检测的物体上,那么对应模型点云中也有一点 ,将这两个点及其法线对齐后,对象可以围绕
,将这两个点及其法线对齐后,对象可以围绕 法线旋转
法线旋转 ,使模型与场景对齐。于是有从模型空间到场景空间的刚体运动可以通过,对齐参数:
,使模型与场景对齐。于是有从模型空间到场景空间的刚体运动可以通过,对齐参数: 来表示。由于可以由相似特征查询到相似的点对,
来表示。由于可以由相似特征查询到相似的点对,
 ,都可以计算出旋转角。例如,对于每个模型表面上可能的位姿的
,都可以计算出旋转角。例如,对于每个模型表面上可能的位姿的 ,通过使用公式(2)计算使得
,通过使用公式(2)计算使得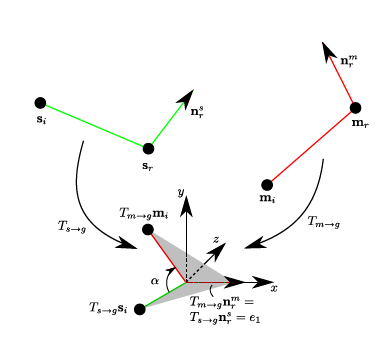
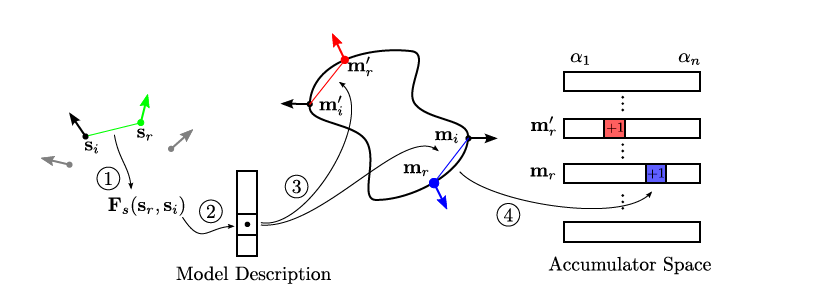
 等于模型采样点
等于模型采样点 的个数。列数
的个数。列数 对应旋转角度的样本步骤
对应旋转角度的样本步骤 的个数。这个累加器阵列表示一个固定参考点的局部坐标的离散空间。霍夫空间中累加值最大的(mr,α)为最优对齐参数
的个数。这个累加器阵列表示一个固定参考点的局部坐标的离散空间。霍夫空间中累加值最大的(mr,α)为最优对齐参数 ,组成一对。然后在模型的曲面上搜索“距离和法线方向”与
,组成一对。然后在模型的曲面上搜索“距离和法线方向”与 相似的
相似的 点进行处理后(
点进行处理后( ,这样
,这样 和
和 分别依赖于模型和场景上的点对。这样我们可以将旋转矩阵分解为
分别依赖于模型和场景上的点对。这样我们可以将旋转矩阵分解为 ,令
,令 来获得
来获得
 位于由x轴和y轴的非负部分定义的半平面上, 对于模型或场景中的每个点对,t是唯一的。因此,
位于由x轴和y轴的非负部分定义的半平面上, 对于模型或场景中的每个点对,t是唯一的。因此, ,这个步长与模型直径相关,
,这个步长与模型直径相关, 。省缺情况下,设置抽样率
。省缺情况下,设置抽样率 为0.05。
为0.05。