


第十章 流
页锁定主机内存、CUDA流、GPU工作调度机制
建议下载下来用Typora软件阅读markdown文件
作者github:littlebearsama 原文链接
(建议下载Typora来浏览markdown文件)
第十章 流
通过CUDA流在GPU上用任务并行
页锁定主机内存
两个主机内存分配函数:
- 标准C库函数
malloc()在主机上分配内存 - CUDA运行时提供自己独有的机制来分配主机内存:
cudaHostAlloc()。
两个函数分配的内存之间的差异:
malloc()将分配标准的,可分页的(Pagable)主机内存,cudaHostAlloc()将分配页锁定的主机内存(固定内存)
页锁定主机内存
页锁定主机内存也称为固定内存(Pinned Memory)或者不可分内存。
- 对于固定内存,操作系统将不会对这块内存分页交换到磁盘上,从而确保了该内存始终驻留在物理内存中。因此,操作系统能够安全地使用某个程序访问该内存的物理地址,因为这块内存将不会被破坏或者重新定位。—>物理地址固定不变。
- 由于知道内存的物理地址,因此可以通过“直接内存访问(Direct Memory Access,DMA)”技术来在GPU和主机之间复制数据。DMA操作在可分页内存中可能会延迟—>DMA复制过程中使用固定内存非常重要,页锁定主机内存(固定内存)的性能比标准可分页的性能要高大约2倍。
实际上并不是说使用固定内存就好

固定内存是一把双刃剑。但是用固定内存时,你将失去虚拟内存的所有功能。应用程序中使用每个固定内存时都需要分配物理内存,因为这些内存不能交换到磁盘上。—>意味着系统更快地耗尽内存。
使用情况:仅对
cudaMemcpy()调用中的源内存或者目标内存,才使用也锁存内存,并且不再需要他们时立即释放,而不是等到程序关闭才释放。页锁定内存的作用不仅限于性能的提升,后面章节会看到,在一些特殊情况中也需要使用页锁定内存。
调用:
1
2
3
4
5
6
7
8
#define SIZE (64*1024*1024)
int *a;
int size = SIZE;
//CUDA运行时申请固定内存
HANDLE_ERROR( cudaHostAlloc( (void**)&a,
size * sizeof( *a ),
cudaHostAllocDefault ) );
计算带宽
1 | float MB = (float)100*SIZE*sizeof(int)/1024/1024;//SIZE=(64*1024*1024) |
CUDA流
- CUDA流表示一个操作GPU队列
- 该队列的操作将以指定的顺序执行。我们可以在流中添加一些操作,例如启动核函数,内存复制,以及事件的启动和结束等。
- 可以将流视为GPU上的一个任务,并且这些任务可以并行执行。
设备重叠功能的GPU
支持设别重叠功能的GPU能在执行一个CUDA C核函数的同时,还能在设备与主机之间执行复制操作。可以使用多个流来实现这种计算与数据传输的重叠。
使用流
1 | #include "../common/book.h" |
- 创建流和事件
- 分配好设备内存和主机内存
- 分块执行三个步骤
- 当for循环结束时,队列中应该包含了很多等待GPU执行的工作。如果想要确保GPU只能执行完了计算和内存复制等操作。那么就需要将GPU与主机同步。也就是说主机在继续执行之前要先等待GPU完成。调用
cudaStreamSynchronize()并指定想要等待的流
主机与设备之间复制数据
cudaMemcpy()同步方式执行:意味着,当函数返回时,复制操作已经完成,并且在输出缓冲区包含了复制进去的内容。- 新函数
cudaMemcpyAsync()异步方式执行:与同步方式相反,在调用该函数时,只是放置一个请求,表示在流中执行一次内存复制操作,这个流是通过函数stream来指定的。当函数返回时,我们无法确保复制操作是否已经启动,更无法保证它是否已经结束。我们能够保证的是,复制操作肯定会当下一个被放入流中的操作之前执行。 - 任何一个传递给
cudaMemcpyAsync()的主机内存指针都必须已经通过cudaHostAlloc()分配好内存。你只能已异步方式对固定内存进行复制操作。
带有流参数的核函数
此时核函数的调用是异步的。
使用多个流
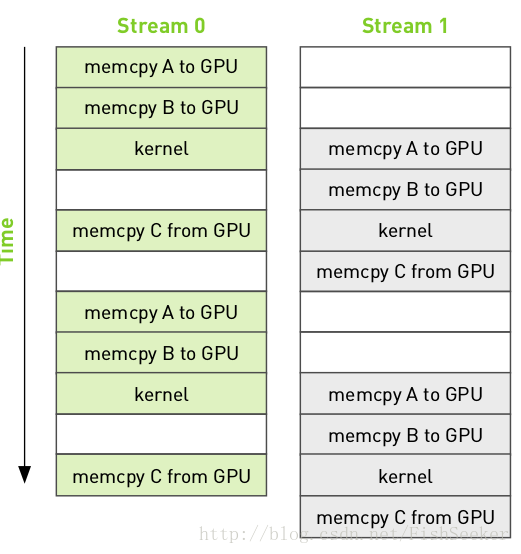
改进思想:
- 分块计算
- 内存复制和核函数执行的重叠
- 上图中,第0个流执行:核函数时,在第1个流中执行:输入缓冲区复制到GPU……
- 在任何支持内存复制和核函数的执行相互重叠的设备上,当使用多个流是,应用程序的整体性能都会提升。
代码:
1 | #include "../common/book.h" |
因为使用了两个流,for循环中处理的数据量为原来的两倍,步长为原来的两倍,程序处理的总数据量不变。
处理数据量是相同的,结果是一个流与两个流使用的时间差不多。
一个流使用的时间是24.1ms~25.2ms,
两个流使用的时间是:23.1~23.9ms,
修改后代码使用时间为23.9ms~24.9ms
使用了流的确改善了执行时间,但是在一个流和多个流之间并没有明显的性能提高。
GPU工作调度机制
- 程序员可以将流视为有序的操作序列,其中既包含内存复制操作,又包含核函数调用。
- 然而,硬件中并没有流的概念,而是包含一个或多个引擎来执行内存复制操作,以及一个引擎来执行核函数。这些引擎彼此独立地对操作进行排队。
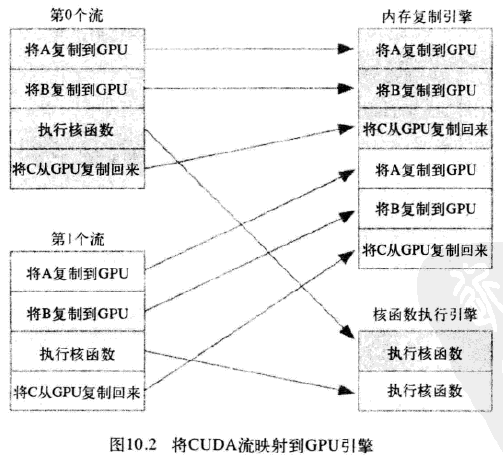
应用程序首先将第0个流的所有操作放入队列,然后是第一个流的所有操作。CUDA驱动程序负责按照这些操作的顺序把他们调度到硬件上执行,这就维持了流内部的依赖性。图10.3说明了这些依赖性,箭头表示复制操作要等核函数执行完成之后才能开始。
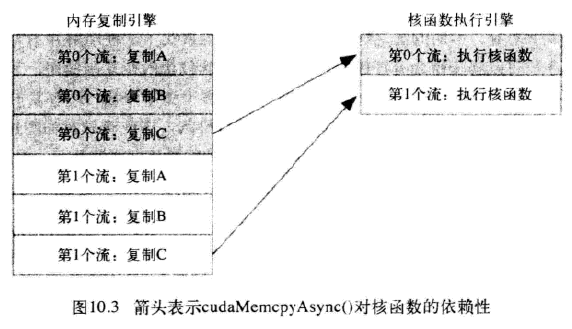
于是得到这些操作在硬件上执行的时间线:
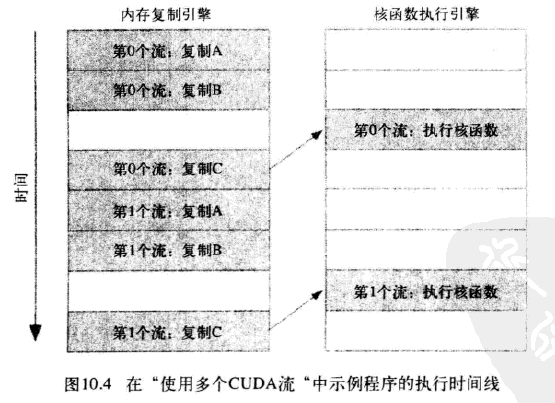
- 图中显示,第0个流复制C阻塞了第1个流复制A,第一个流复制B,导致第0个流执行完核函数还要等待内存复制引擎完成流0复制C,流1复制A,流1复制B的三个操作才能执行流1核函数
由于第0个流中将c复制回主机的操作要等待核函数执行完成,因此第1个流中将a和b复制到GPU的操作虽然是完全独立的,但却被阻塞了,这是因为GPU引擎是按照指定的顺序来执行工作。记住,硬件在处理内存复制和核函数执行时分别采用了不同的引擎,因此我们需要知道,将操作放入流队列中的顺序将影响着CUDA驱动程序调度这些操作以及执行的方式。
高效使用多个流
如果同时调度某个流的所有操作,那么很容易在无意中阻塞另一个流的复制操作或者核函数执行。要解决这个问题,在将操作放入流的队列时应采用宽度优先方式,而非深度优先方式。如下代码所示:
1 | for (int i=0; i<FULL_DATA_SIZE; i+= N*2) { |
如果内存复制操作的时间与核函数执行的时间大致相当,那么新的执行时间线将如图10.5所示,在新的调度顺序中,依赖性仍然能得到满足:

由于采用了宽度优先方式将操作放入各个流的队列中,因此第0个流对c的复制操作将不会阻塞第1个流对a和b的内存复制操作。这使得GPU能够并行的执行复制操作和核函数,从而使应用程序的运行速度显著加快。
- 实验结果表明,并没有改进性能,可能是高版本的CUDA运行时已经对流和复制引擎等进行了优化(个人猜想)