


点云配准之迭代最近点
A.配准的意义:
两个几何数据集的刚性配准在机器人导航、曲面重建和形状匹配等许多应用中都是必不可少的。最常见的方法是使用迭代最接近点(ICP)算法及其变体来完成这项任务。这些方法在最近点计算之间交替,以建立两个数据集之间的对应关系,并求解使这些对应关系对齐的最优转换。
B.ICP及其变种
1.最开始的3D icp
Besl, Paul J., and Neil D. McKay. “A method for registration of 3-D shapes.” IEEE Transactions on pattern analysis and machine intelligence 14.2 (1992): 239-256.
可以使用PCL进行测试
2.Fast icp(Soft Outlier Rejection)
Rusinkiewicz, Szymon, and Marc Levoy. “Efficient variants of the ICP algorithm.” 3-D Digital Imaging and Modeling, 2001. Proceedings. Third International Conference on. IEEE, 2001.
该文章被引用次数极高,文章分析了影响icp的各种因素,对几种icp变体进行比较,并且提出了fast icp。能够在几十毫秒内对齐两张深度图(range images)
工程:http://gfx.cs.princeton.edu/proj/trimesh2/
该工程更新了收敛非常快的“对称ICP”。
3.广义ICP/plane-to-plane ICP:Generalized-icp(GICP)
Segal, Aleksandr, Dirk Haehnel, and Sebastian Thrun. “Generalized-ICP.” Robotics: science and systems. Vol. 2. No. 4. 2009.
作者主页:http://www.robots.ox.ac.uk/~avsegal/
工程:https://github.com/avsegal/gicp
4.sparse icp
稀疏ICP方法采用稀疏诱导准则对该问题进行求解,显著提高了配准过程对大量噪声和离群值的恢复能力,但引入了显著的性能退化。
Efficent Sparse icp:结合模拟退火搜索和Sparse ICP
https://github.com/opengp/sparseicp
5.全局优化ICP:Go-ICP
Yang, Jiaolong, et al. “Go-ICP: a globally optimal solution to 3D ICP point-set registration.” IEEE transactions on pattern analysis and machine intelligence 38.11 (2016): 2241-2254.
C.基于CUDA加速
1.em-icp
2.cudaICP
应用
KinectFusion 中的 ICP 算法 GPU 代码解读
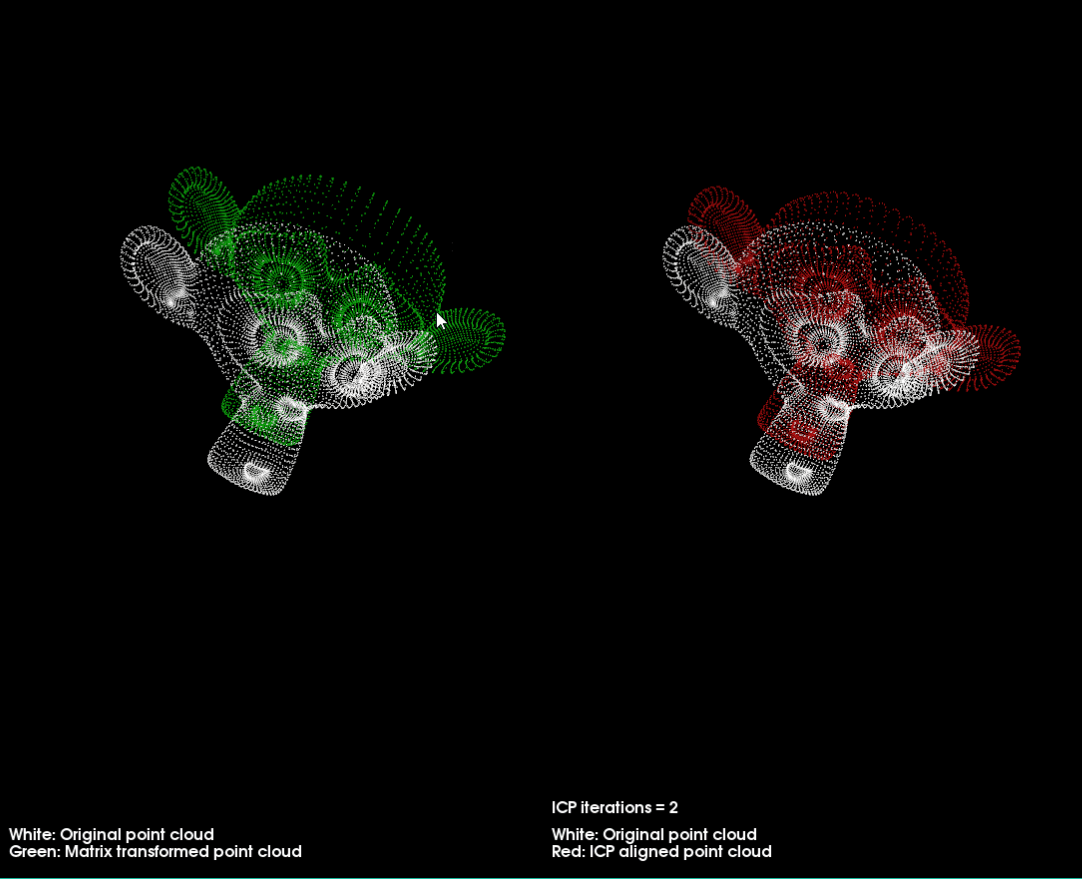
D.使用pcl来实现ICP
简单的程序:迭代猴子
E.给出其他参考:
Iterative Closest Point (ICP) and other matching algorithms

后台回复“icp”自动回复论文和代码(完)