


计算刚体变换矩阵
问题:已知有对应点对(correspondence; point pairs)P、Q集合,求解PQ之间的刚体变换矩阵
参考1: 求解刚体旋转平移关系–配准
参考2: SVD Least-Squares Rigid Motion Using SVD 3D3D算变换矩阵
1.待定系数法
- 容易得到超定方程组,利用最小二乘法求解超定方程组
- 由于输入数据的误差,导致算出来不是一个正交的旋转矩阵
每一个一一对应点满足:
对于第 个一一对应点得到方程组:
同理将所有一一对应点的方程组合并, 得到超定方程:
利用最小二乘法求解
得到向量 , 写为矩阵形式即
.
缺点: 在有原始数据误差或者计算累积误差情况下, 得到的矩阵 不一定严格满足正交矩阵.
2.Levenberg-Marquardt方法求解(非线性)
- 输入变量从旋转矩阵R转为欧拉角R( , , )。
- 将非线性问题转化为线性优化。
- 使用信赖域法求极值。
旋转矩阵具有3个自由度, 可以理解为3个Euler角可确定一个旋转状态, 或一个四元数(范数为1, 自由度为4-1=3)可确定一个旋转状态. 可利用
作为非线性拟合的参数, 旋转矩阵
由
唯一确定, 并使得在该参数下误差最小, 即:
得到即得到旋转矩阵
, , 该方法可保证该矩阵严格为正交矩阵.
缺点: Levenberg-Marquardt方法一方面对该优化问题的初值有一定要求, 另一方面非线性算法的效率较低.
LM算法原理
LM算法,全称为Levenberg-Marquard算法,它可用于解决非线性最小二乘问题,多用于曲线拟合等场合。
- 它的关键是用模型函数 对待估参数向量 在其邻域内做线性近似,忽略掉二阶以上的导数项,从而转化为线性最小二乘问题.
- 它具有收敛速度快等优点。
- LM算法属于一种“信赖域法”——所谓的信赖域法,此处稍微解释一下:在最优化算法中,都是要求一个函数的极小值,每一步迭代中,都要求目标函数值是下降的,而信赖域法,顾名思义,就是从初始点开始,先假设一个可以信赖的最大位移 ,然后在以当前点为中心,以 为半径的区域内,通过寻找目标函数的一个近似函数(二次的)的最优点,来求解得到真正的位移。在得到了位移之后,再计算目标函数值,如果其使目标函数值的下降满足了一定条件,那么就说明这个位移是可靠的,则继续按此规则迭代计算下去;如果其不能使目标函数值的下降满足一定的条件,则应减小信赖域的范围,再重新求解。
3.SVD奇异值分解方法(线性)
- 对协方差3X3矩阵用SVD(奇异值分解)来计算旋转矩阵R
Singular Value Decomposition*
1.计算两个点集的中心(重心)。将两个点集利用中心(重心),平移到原点处。
2.利用两个平移后的点集计算协方差矩阵S
3.用SVD奇异值分解方法对S进行分解获得旋转矩阵S
4.通过两个点集的中心和旋转矩阵S获得平移向量t
总结
方法一(待定系数求解方程组)和方法二(LM优化方法求解)并不是求解刚体旋转矩阵 和平移矩阵
的最佳方法. 方法三中只需利用SVD分解( (
规模数据矩阵)即可得到所需结果, 不仅过程简单而且求解精度很高.
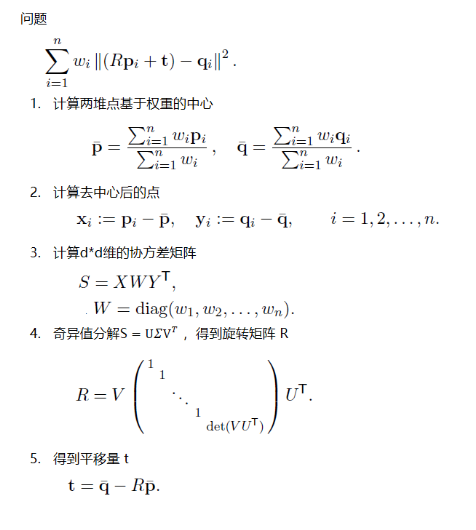
经过一些列推导后, 我们得到最终的结果, 是不是很晕….如果对推导的过程不感兴趣的话, 可以直接看下面的计算步骤:
STEP0: 已知刚性运动前后的对应点分别为 和
), 均为
向量
STEP1: 分别计算 和
的重心(求和平均)得到
和
STEP2: 计算重心平移到原点的数据
STEP3: 矩阵形式描述 记为
,
记为
STEP4: 计算数据矩阵 并作SVD分解
STEP5: 得到旋转矩阵
STEP6: 得到平移向量
SVD原理
1.
旋转矩阵 具有3个自由度, 可以理解为3个Euler角可确定一个旋转状态, 或一个四元数(范数为1, 自由度为4-1=3)可确定一个旋转状态. 可利用
作为非线性拟合的参数, 旋转矩阵
由
唯一确定, 并使得在该参数下误差最小, 即:
得到 即得到旋转矩阵
, 该方法可保证该矩阵严格为正交矩阵.
缺点: Levenberg-Marquardt方法一方面对该优化问题的初值有一定要求, 另一方面非线性算法的效率较低.
方法三: Singular Value Decomposition 奇异值分解方法
通过对应点求解旋转矩阵 可写为优化问题:
可以将对应点列写为矩阵形式
 3行N列
3行N列
矩阵 记为
,
记为
, 则优化问题简化为:
在求解上面优化问题之前, 先回顾几个线性代数里的基本知识:
- 旋转(正交)矩阵的性质
;
为 Frobenius 范数, 即矩阵所有值的平方和之方根;
其中
为矩阵的迹;
- 矩阵
和
均为
阶, 则
;
- Singular Value Decomposition (SVD)分解, 矩阵
,其中
和
为正交矩阵,
为对角矩阵;
于是优化问题可等价为:
其中矩阵 和
由原始数据得到的矩阵, 与旋转矩阵
无关, 于是
进一步, 利用矩阵迹的性质(基本知识第4点)
使用SVD分解数据矩阵 , 其中
和
为正交矩阵, 于是
再一次使用矩阵迹的性质(基本知识第4点)
记其中的矩阵 , 不难得知
也为正交矩阵, 综上:
由于 为对角矩阵
由于 矩阵为正交矩阵, 而且正常数据下对角阵
对角元素为数据矩阵的奇异值均大于0; 而且
均小于等于1, 不难得知当
时取最大值, 即:
从而得到:
至此可以得到旋转矩阵 , 不难得到平移向量
.
2.
